|
|
Aggiornato martedì 23 maggio 2023
Online dal 14 maggio 2005
Simulatore Ae 6/6
Interfaccia con modello in scala H0
In relazione al progetto del simulatore di Ae 6/6, nell'estate 2016 è nata l'idea di far muovere un modellino di locomotiva in scala H0 (1:87) sincronizzato con simulazione.

Indice dei contenuti
• Corrente continua (DC) o corrente alternata (AC)?
• Protocollo: DCC, Motorola o mfx (M4)?
• Varianti
• Costi
Analogico o digitale?
Al giorno d'oggi è possibile comandare un modellino sostanzialmente con due metodi differenti:
• Comando analogico
• Comando digitale
Il comando analogico prevede semplicemente una tensione variabile sul binario, in funzione della quale la locomotiva si muove più
o meno velocemente. Lo svantaggio più grande di questo metodo è che ogni modello che si trova sullo stesso tratto di binario
si muove in contemporanea. Per evitare questo inconveniente si dovrebbe quindi procedere ad un complicato sezionamento della
rete di binari.
Con un comando digitale, invece, sui binari vi è sempre una tensione fissa sulla quale sono modulati dei segnali
digitali che vengono interpretati da un decoder installato su ogni locomotiva. Questo decoder reagisce unicamente ai
telegrammi indirizzati a lui: è così possibile far muovere ogni modellino in maniera indipendente senza dover ricorrere
ai sezionamenti dei binari. Grazie a questi telegrammi digitali è inoltre possibile attivare o disattivare a piacimento
alcune funzioni della locomotiva, come ad esempio le luci esterne o tutta una serie di suoni (rumore dei motori, compressore,
fischio, ...).
Dopo una breve valutazione è risultato subito chiaro che l'unica strada percorribile sarebbe stata quella del comando digitale. Oltre alla maggiore versatilità, questo tipo di comando permette di realizzare un'interfaccia verso il simulatore più semplice, lasciando il compito della parte di potenza ad un componente esterno facilmente reperibile sul mercato.
Corrente continua (DC) o corrente alternata (AC)?
I modelli analogici si differenziano tra modelli con motori a corrente alternata (AC) o con motori a corrente continua (DC).
I modelli in AC utilizzano dei binari a 3 rotaie: le due rotaie esterne costituiscono assieme uno dei due potenziali, mentre al centro del binario vi è tutta una serie di contatti (integrati nelle traversine) che si collegano alla locomotiva tramite un pattino centrale.
I modelli in DC, invece, utilizzano dei binari in cui le due rotaie sono elettricamente isolate fra loro sulle quali vi è il
"più" e rispettivamente il "meno". Il modello capta quindi la corrente unicamente tramite le proprie ruote.
In passato esistevano anche delle altre combinazioni, come ad esempio i vecchi Trix che funzionavano in DC ma che avevano un
sistema a 3 rotaie. Al giorno d'oggi questi sistemi sono però praticamente scomparsi.
Con il comando digitale questa distinzione ha perso un po' di significato: in pratica, anche nei sistemi cosiddetti DC,
sul binario vi è un segnale ad onda quadra di circa +/- 18V. Il periodo dell'onda quadra viene fatto variare a dipendenza
se si vuole tramettere un 1 o uno 0. Di fatto si tratta perciò di una tensione alternata. In un sistema digitale, quindi,
con i termini AC e DC si indica unicamente se i binari sono a 3 o a 2 rotaie.
Grazie a questo piccolo ma importante dettaglio è possibile realizzare delle interfacce universali che possono funzionare
sia con impianti "AC" che con impianti "DC".
Dato che il materiale disponibile per fare i test era tutto "DC analogico", è stato deciso di procedere con la variante a
2 rotaie.
Protocollo: DCC, Motorola o mfx (M4)?
I telegrammi per la comunicazione tra modello e centrale sono molteplici. I più diffusi sono DCC (Digital Command Control), Motorola e mfx (M4). Storicamente per gli impianti DC si è sempre usato il protocollo DCC, mentre i protocolli Motorola e mfx sono nati originariamente per i sistemi Märklin. Nel frattempo ogni centralina supporta praticamente ogni protocollo.
Il protocollo mfx è un sistema proprietario della Märklin: la variante universale è invece denominata M4. Questo sistema ha il grosso vantaggio rispetto a tutti gli altri che la locomotiva è in grado di spedire anch'essa dei messaggi alla centrale (velocità effettiva, impostazioni, nome della locomotiva, ...).
Dato che il progetto non richiede necessariamente una comunicazione della locomotiva verso il simulatore, è stato scelto di utilizzare il protocollo DCC.
Architettura
Nell'immagine sottostante è raffigurato il principio dell'interfaccia tra il simulatore e il modello in scala.
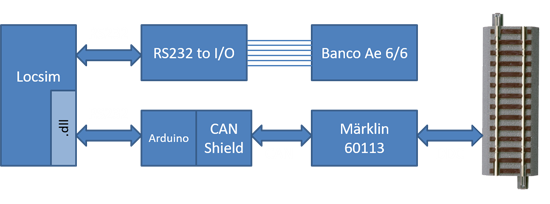
Concetto interfaccia Locsim-DCC con arduino
Nel programma di simulazione Locsim è stata realizzata una funzione specifica che permette raccoglie tutte le informazioni
necessarie, le codifica e le invia alla porta RS232 del computer.
Un Arduino riceve ed interpreta queste informazioni e le inoltra tramite CAN al modulo di interfaccia Märklin 60113. Questo
modulo trasforma i telegrammi ricevuti via CAN in segnali DDC da inviare sui binari, accoppiandoli allo stesso tempo con
l'alimentazione vera e propria della locomotiva.
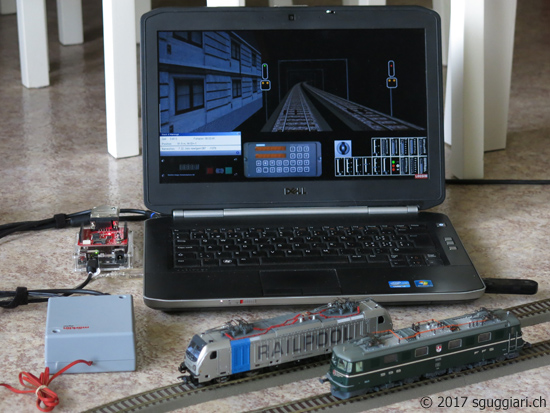
Risultato finale
La dimostrazione del funzionamento è visibile nel video sottostante. L'accoppiamento con il simulatore funziona correttamente e il modellino si muove come desiderato.
Le seguenti funzioni possono essere comandate con il simulatore:
• Movimento in avanti e indietro
• Cambio cabina
• Luci on/off
• Suono on/off
• Fischio on/off
Interfaccia Locsim-DCC con arduino
Compromessi
1) La velocità della locomotiva in scala e quella calcolata in km/h dal programma di simulazione devono essere tarate in modo da essere più o meno equivalenti. Il problema è che ogni modello ha una propria velocità massima in funzione del tipo di motore installato e da altri parametri imposti dal costruttore. Per ovviare a questo problema in Locsim è possibile definire un parametro per allineare la velocità del modello a quella della simulazione.
2) Le luci nel modellino si accendono sempre in funzione della direzione di marcia. Non è quindi possibile, se non con diverse modifiche nel circuito elettrico del modellino, fare andare una locomotiva in una direzione mantenendo le luci accese con la configurazione per la direzione opposta.
Varianti
Con la configurazione hardware di base "Arduino + Märklin 60113" si possono naturalmente
sviluppare anche delle mini-centraline digitali che funzionano indipendentemente dal simulatore Locsim.
Le varianti realizzate sono le seguenti:
• Controllo tramite tasti e potenziometri fisici
• Controllo tramite display touchscreen
Controllo con tasti fisici
La variante più semplice da implementare è quella di collegare direttamente all'Arduino tutta una serie di tasti, interruttori e potenziometri. Le limitazioni di questa configurazione sono evidenti: per ogni singola funzione del decoder occorre un corrispettivo elemento fisico da comandare. Dato che il numero di entrate e di uscite di un Arduino sono limitate, si rischia di dover studiare soluzioni alternative più complesse. Inoltre vi è il problema dell'impostazione dell'indirizzo della locomotiva: la variante più banale è quella di programmare in maniera fissa un certo indirizzo, mentre se si vuole avere un sistema più dinamico occorre implementare un metodo per impostare manualmente un qualsiasi indirizzo, sempre tenendo conto del numero limitato di entrate e uscite dell'Arduino.

Interfaccia DCC con arduino e tasti fisici
Controllo con display touchscreen
Un po' più complicata ma più interessante da fare è la variante con schermo LCD touchscreen. Il problema principale è che il display touchscreen utilizzato occupa già da solo la maggior parte dei pin di un Arduino Uno. La soluzione più pratica è stata quindi quella di dedicare un Arduino unicamente alla gestione del display. I due Arduini comunicano così fra di loro tramite una semplice interfaccia seriale composta da due soli fili.
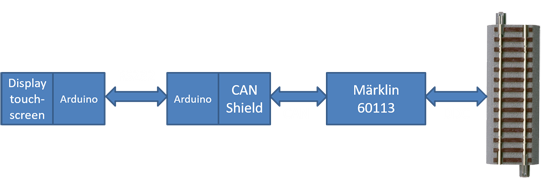
Concetto interfaccia DCC con arduino e display touchscreen

Interfaccia DCC con arduino e touchscreen
Rispetto alla variante con i tasti fisici, sul touchscreen è possibile dare libero sfogo alla propria fantasia e implementare ogni tipo di comando desiderato. Nel video sottostante è possibile vedere com'è semplice controllare due locomotive differenti contemporaneamente. L'unico limite è dato dalla grandezza limitata del display (2.4"). Una versione con un Arduino Mega e un display da 3.2" è in fase di elaborazione.
Costi
Di seguito la lista dei prezzi dei componenti necessari per la realizzazione dei progetti presentati in questa pagina. I prezzi sono naturalmente soggetti ad una variazione nel tempo, motivo per il quale sono indicati prezzi di gennaio 2017.
Componente |
Prezzo originale |
Prezzo alternativo |
Commento |
• Arduino Uno |
22.00 CHF |
3.19 $ 1 |
|
• Shield CAN |
29.90 CHF |
- |
|
• Märklin 60113 |
70.00 CHF |
~30.00 CHF 2 |
|
• Märklin 66360 |
49.00 CHF |
~30.00 CHF 2 |
Alimentatore 36VA |
• Cavo + connettori |
~10.00 CHF |
- |
|
• LCD touchscreen |
3.45 $ 1 |
- |
Optional |
• Arduino Uno per LCD |
22.00 CHF |
3.19 $ 1 |
Optional |
• Schield con morsetti (2x) |
5.00 $ 1 |
- |
Optional |
Totale |
~180.00 CHF |
~105.00 CHF |
|
Totale con optional |
~210.00 CHF |
~120.00 CHF |
1 AliExpress
2 Ricardo / eBay, componenti nuovi o d'occasone
A queste cifre occorre aggiungere i costi di spedizione che, se ordinati singolarmente, possono raggiungere comodamente i 7.- CHF per ogni componente. Per articoli provenienti dalla Cina (AliExpress) con spedizione gratuita, tenere in considerazione tempi di consegna molto lunghi, generalmente tra 1 e 2 mesi.
Referenze
• Railuino
Sandro Guggiari © 2005-2026
sguggiari.ch
![]()
![]()
![]()